


Læs mere om forløbet
Læs mere om forløbet
Vil I arbejde videre med en designudfordring, hvor eleverne undersøger muligheder for selvkørende teknologi i kollektiv trafik? Læs mere nedenfor, hvor du også finder information om blokkodning, selvkørende biler og vores samarbejdspartnere.
Forløbet tager afsæt i FN's verdensmål 11.2, som udover sikkerhed og tryghed i trafikken også fokuserer på adgangen til effektive kollektive transportsystemer med handicapvenlige forhold og overkommelige billetpriser.
Designudfordring
Hvis du ønsker at arbejde videre med verdensmålet, kan du give eleverne en designudfordring, hvor de skal undersøge, hvordan selvkørende teknologi kan bruges i en kollektiv kontekst. Her ligger fokus på den del af problemstillingen, der handler om trængsel og tilgængelighed.
En designudfordring tager udgangspunkt i en design thinking-proces fx FIRE-modellen. FIRE-modellen består af fire faser: Forstå, Ideudvikling, Realiser og Evaluer. Herunder følger en kort forklaring af de fire faser:
- Fase 1: Forstå
I fase 1 opnår eleverne forståelse for det problem, der skal løses. De skal stille krav til designet ud fra brugernes behov. Denne brugerforståelse indebærer en indsigt i, hvorfor udfordringen er et problem, hvem udfordringen er et problem for, og på hvilken måde udfordringen er et problem. - Fase 2: Ideudvikling
I fase 2 ideudvikler eleverne konkrete løsninger ud fra brugernes behov og designkrav. Eleverne udvikler ideer ud fra de designkrav, de opstillede i fase 1. Herefter deler de og inspireres af hinandens gode og mindre gode ideer. - Fase 3: Realiser
I fase 3 realiserer eleverne de bedste ideer ved at konkretisere dem. Indledningsvis designer eleverne prototyper, som de tester, afprøver, diskuterer og forbedrer. Ved at tegne, klippe og bygge med forskellige materialer nærmer eleverne sig deres konkrete forslag til en løsning på brugernes udfordring. - Fase 4: Evaluer
I fase 4 evaluerer eleverne prototypens opfyldelse af brugernes behov. Det endelige produkt præsenteres om muligt for brugerne, fx via en test af produktet. Eleverne reflekterer desuden over deres egen proces og udbytte af designudfordringen.
På emu.dk kan du finde mere information om designprocesser.
Blokkodning
Eleverne bruger det webbaserede program mBlock til at bygge og overføre kode til robotterne. Det kræver installation af driveren mLink. Du kan læse mere i afsnittet "Din forberedelse" ovenfor.
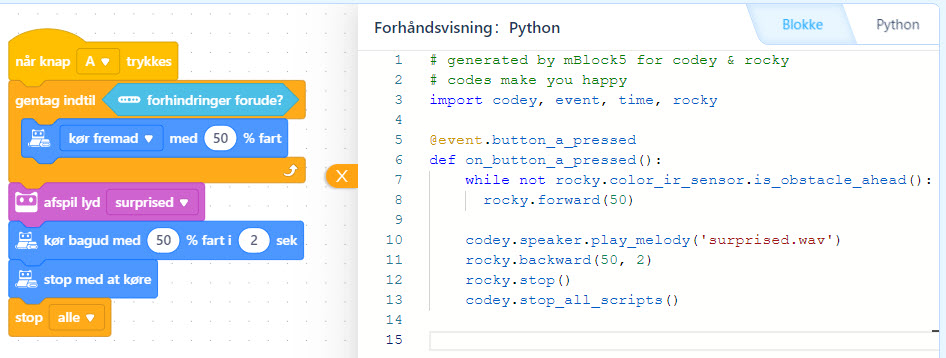
Blokkodning er en måde at bygge kode på, der benytter sig af grafiske byggeklodser i stedet for et rigtigt kodesprog, fx kodesproget Python (se illustrationen herunder). De enkelte kodeblokke har forskellige farver, der indikerer, hvilken kategori de tilhører. Kategorierne er fx sensorinput, løkker, lydoutput og styring af robottens motorer.
Blokkene har forskellige fysiske udformninger, der sikrer, at de nemt kan samles, så en computer kan aflæse dem. Når eleverne har bygget en kode, der kan eksekveres af en computer, kaldes det syntax. Hvis kodeblokkene ikke passer, betyder det, at koden er bygget på en måde, computeren ikke kan aflæse. Eleven har altså lavet en syntaxfejl.
Nedenfor kan du læse et par vigtige pointer om blokkodning.
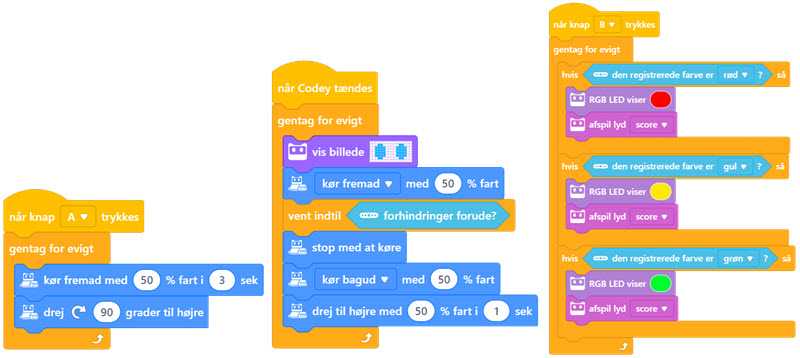
- Hændelsesblokke er de gule blokke og kaldes også startblokke. Denne blok fortæller robotten, hvilket input der får robotten til at udføre en bestemt handling. Det kan fx være lyd, lys, bevægelse eller et tryk på én af robottens knapper. En kode kan som udgangspunkt kun eksekveres af robotten, hvis den er forbundet til en hændelsesblok. Ved at bruge forskellige hændelsesblokke kan eleverne overføre mange forskellige koder til robotterne på én gang. Dette kan fx bruges i aktiviteten Kør med sensorer, hvor eleverne kan bygge, overføre og eksekvere fem koder på én gang blot ved at vælge forskellige hændelsesblokke.
Løkker findes i den orange kontrol-kategori. En løkke bruges til at gentage et stykke kode flere gange. På den måde slipper eleverne for at kopiere koden. En løkke kan indstilles til at kopiere et stykke kode, lige så mange gange man ønsker. Der findes også mere komplicerede former for løkker som fx betingelser eller hvis-så-løkker. En betingelse kan bruges til at bestemme, om noget skal ske eller ikke ske.
Ønsker du mere viden om robotten Codey Rocky, kan du læse mere på firmaet Makeblocks hjemmeside her og her.
Selvkørende biler
En selvkørende bil er en bil, der er udstyret med teknologi, der gør det muligt at køre uden menneskelig indblanding. Denne teknologi inkluderer sensorer, kameraer og andre enheder, der hjælper bilen med at opfange omgivelserne og træffe beslutninger om, hvordan den skal navigere. Udviklingen af selvkørende biler er forbundet med et behov for at skabe et mere effektivt, sikkert og miljøvenligt transportsystem.
Selvkørende bilers autonominiveauer
The Society of Automotive Engineers (SAE) definerer seks niveauer af autonomi. De seks niveauer beskriver, i hvor høj grad styringen af en bil overtages af autonome systemer. Disse niveauer er blevet vedtaget af det amerikanske transportministerium og siden gjort til branchestandard.
- Niveau 0 - ingen automatisering
Bilen har ingen selvkørende funktioner. - Niveau 1 - assisteret kørsel
Bilen har enkelte selvkørende funktioner fx adaptiv fartpilot eller vejbane-assistance. - Niveau 2 - delvist automatiseret kørsel
Bilen kan køre selvstændigt, men bilisten skal stadig have fuld kontrol og være parat til at tage over, når det er nødvendigt. - Niveau 3 - betinget automatiseret kørsel
Bilen kan køre selvstændigt under visse omstændigheder, men bilisten skal stadig være parat til at tage over, hvis systemet beder om det. - Niveau 4 - høj grad af automatiseret kørsel
Bilen kan køre selvstændigt i et defineret geografisk område, men bilisten skal stadig være i stand til at tage over, hvis der opstår en nødsituation. - Niveau 5 - fuld automatiseret kørsel
Bilen kan køre selvstændigt under alle forhold, og bilisten behøver på intet tidspunkt at overtage kontrollen.
Udfordringer med selvkørende teknologier
Der følger flere udfordringer med brugen af selvkørende biler.
- Teknologisk udvikling
Selvkørende teknologi er stadig i sin vorden, og der er mange tekniske udfordringer, der skal løses, før selvkørende biler kan blive almindeligt accepterede og udbredt. - Juridiske og lovgivningsmæssige spørgsmål
Der er mange juridiske og lovgivningsmæssige spørgsmål, der skal løses i forbindelse med brugen af selvkørende biler. Det gælder særligt spørgsmålet om ansvar og erstatning i tilfælde af ulykker. - Accept fra offentligheden
Der er mange mennesker, der er skeptiske over for ideen om selvkørende biler, og det kan være svært at få bred accept af teknologien. - Infrastruktur
Selvkørende biler kræver en avanceret infrastruktur, da sensorer og andre teknologiske enheder skal installeres i offentlige veje og gader. Dette kan være dyrt og tidskrævende. - Cybersikkerhed
Selvkørende biler er udsatte for cyberangreb, og der er behov for at sikre, at de ikke kan hackes eller saboteres.
Autopilot er udviklet i samarbejde med forskere fra DTU management.
DTU Management forsker i samspillet mellem ledelse, teknologi og økonomi. De udvikler løsninger i tæt samarbejde med virksomheder og myndigheder.
Deres forskning har til formål at styrke velfærd, produktivitet og bæredygtighed i samfundet. Et nøgleelement er teknologiens rolle og dens interaktion med erhverv og mennesker.
Instituttets forskning er delt op i fire divisioner: Responsible Innovation and Design , Management Science, Bæredygtighed og Transport.