


Lærervejledning til Autopilot

Autopilot er et tværfagligt forløb til 5. klasse i fagene natur/teknologi og matematik med inddragelse af de integrerede mål fra teknologiforståelse.
Her kan du læse lærervejledningen til forløbet.
Fagligt indhold
Hvordan kan selvkørende teknologi være med til at løse nuværende og fremtidige trafikale udfordringer? I forløbet skal eleverne blandt andet lære om sensorer, kodning af robotter og etiske overvejelser forbundet med en ny teknologi som selvkørende biler.
I Autopilot arbejder eleverne med følgende faglige pointer:
- Trafiksikkerhed, trængsel og luftforurening er et stadigt større problem i byer.
- Selvkørende biler kategoriseres i niveau 0-5, alt efter hvor mange valg de er kodet til at træffe, uden at bilisten involveres.
- Selvkørende biler på et højere niveau, end vi kender dem i dag, kan gøre trafikken mere sikker.
- En robot kan fungere som en model for en selvkørende bil.
- Input er påvirkninger udefra, som en selvkørende bils sensorer måler.
- Output er handlinger, som en selvkørende bil udfører, når bilens sensorer måler et input.
- Rækkefølgen på kodeblokkene (kodesyntax) i blokkodning er den samme som rækkefølgen på robottens handlinger.
- De fleste årsager til uheld i trafikken skyldes menneskelige fejl. De tre hyppigste årsager er for høj fart, uopmærksomhed og påvirket kørsel.
- Etiske dilemmaer er en barriere for at tage selvkørende biler på et højere niveau i brug.
Eleverne møder en række centrale fokusord i tekster, app og animationsfilm. Eleverne arbejder både mundtligt og skriftligt med fokusordene. Eleverne skal bl.a. producere fire små videoer til en animationsfilm, hvor de anvender udvalgte fokusord i deres speak.
Eleverne arbejder med følgende fokusord:
- selvkørende bil
- bremselængde
- kode
- blokkodning
- kodeblok
- sensor
- input
- output
- sikkerhed
- reaktion
- handling
- påvirket
- uopmærksomhed
- kodet til
- fart
- uheld
- måle
- forhindring
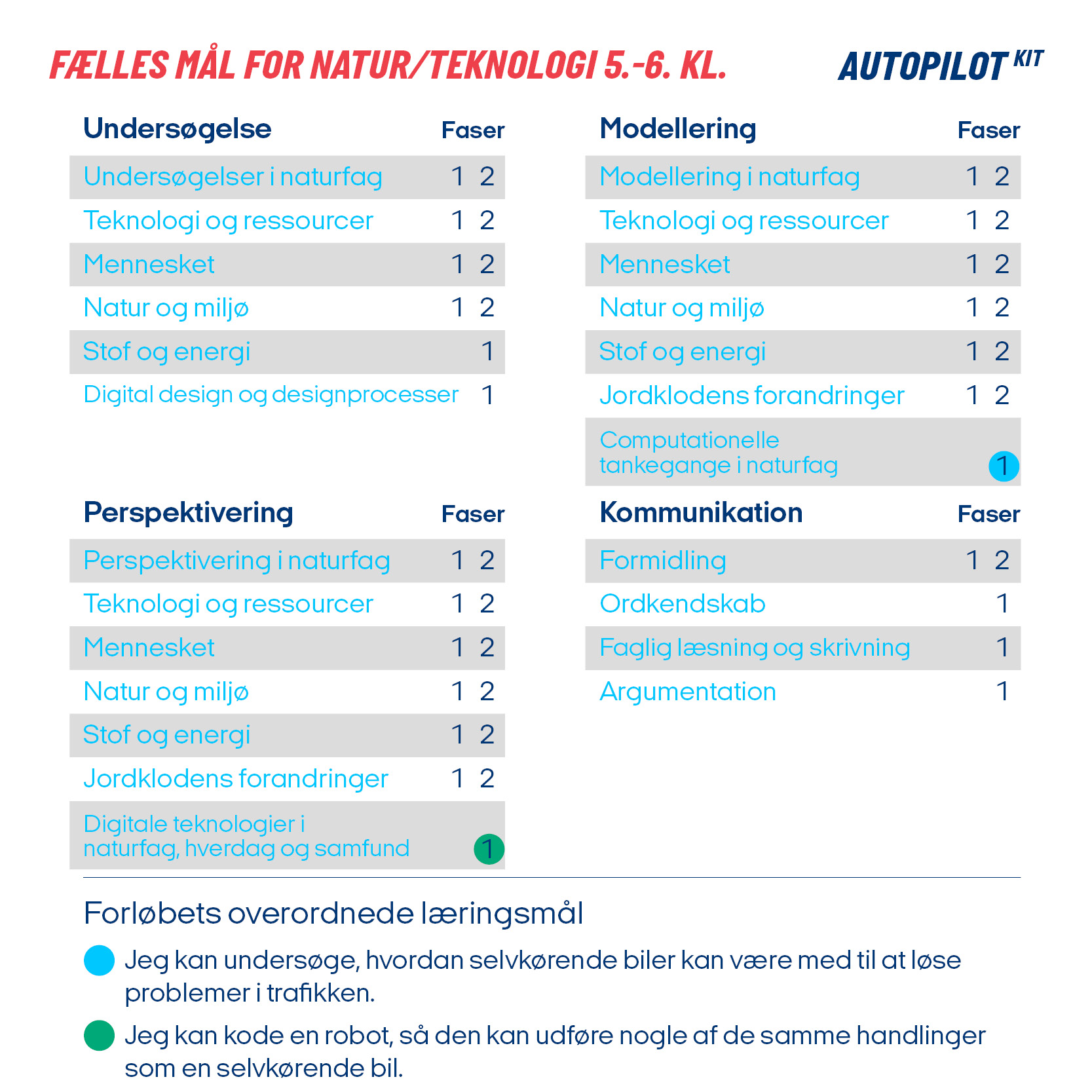
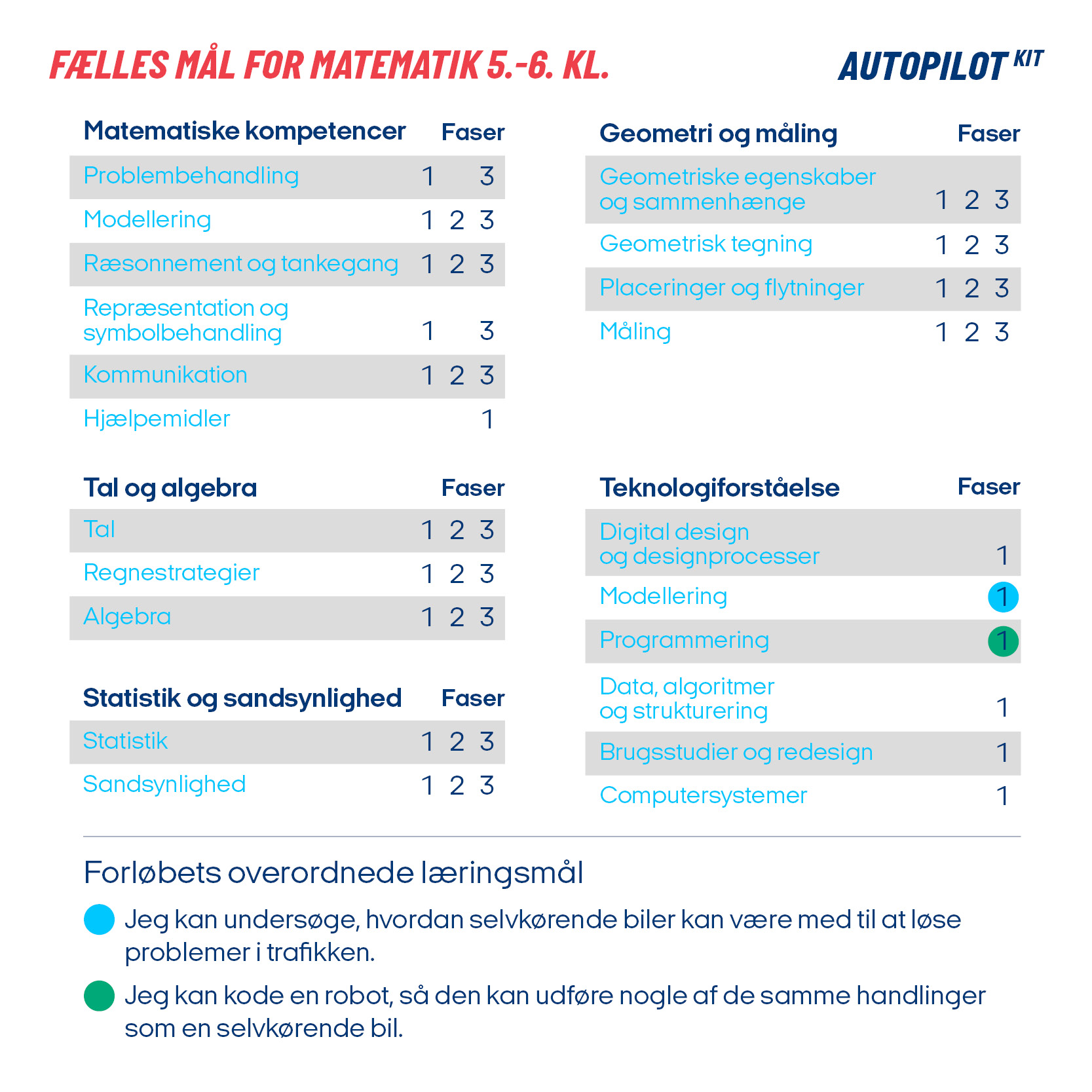
Fælles Mål
Nedenfor kan du se en grafisk oversigt over, hvilke Fælles Mål forløbets overordnede læringsmål relaterer sig til.
FN's verdensmål
Alle undervisningsforløb fra LIFE tager udgangspunkt i FN's verdensmål. I Autopilot arbejdes der med følgende verdensmål:
Verdensmål #11: "Bæredygtige byer og lokalsamfund" med særligt fokus på følgende delmål:
- 11.2. Inden 2030 skal der skabes adgang for alle til sikre, tilgængelige og bæredygtige transportsystemer til en overkommelig pris, trafiksikkerheden skal forbedres bl.a. ved at udbygge den kollektive trafik med særlig hensyn til behov hos sårbare befolkningsgrupper, kvinder, børn, personer med handicap og de ældre.
Mere end halvdelen af verdens befolkning bor nu i byområder. I 2050 vil dette tal være steget til 6,5 milliarder mennesker – svarende til to tredjedele af jordens befolkning. Bæredygtig udvikling kan ikke opnås, hvis vi ikke ændrer den måde, vi bygger og styrer vores byrum. (Kilde: Verdensmaalene.dk, UNDP Danmark)
I fremtiden vil det øgede befolkningstal i byerne sætte et pres på transportsystemerne, og det kan have konsekvenser som forringet trafiksikkerhed og kødannelser. I Autopilot undersøger eleverne, hvordan teknologiske løsninger som selvkørende transportmidler kan bidrage til at løse nogle af de udfordringer, vores byers transportsystemer står overfor.
Elevernes arbejde kredser primært om de trafiksikkerhedsmæssige potentialer, teknologien har. I afsnittet Videre arbejde finder du forslag til klassens videre arbejde med en designudfordring, hvor eleverne skal komme med bud på, hvordan teknologien kan bruges til løsninger i de kollektive transportsystemer.
Din forberedelse
I LIFE Kit finder du alle materialer, som du skal bruge til forløbet.
Følgende aktiviteter kræver særlig forberedelse:
- Undersøg trafikken i Blokby
Her skal eleverne benytte LIFE Autopilot-appen. Det er hensigtsmæssigt, at eleverne på forhånd har downloadet appen. Her finder du et udkast til et forældrebrev med QR-koder til download af appen og information om beskyttelse af elevernes data. Vær opmærksom på, at der kan være elever, der har brug for forældregodkendelse for at installere apps. Vi anbefaler, at denne del af din forberedelse gennemføres, inden undervisningen i forløbet begynder. - Match robotter og koder
Her skal du tjekke, om alle robotter har fået overført den korrekte kode inden levering. Det gør du ved at tænde robotterne og kigge på deres display. Robotterne er inddelt i tre farver: 5 blå, 5 grønne og 5 røde robotter. Når robotterne er tændt, skal tallene 1-5 være repræsenteret på en robot i hver af de tre farver, som det fremgår af billedet her. Mangler en eller flere af robotterne en kode, skal du følge denne overførelsesguide. Vi anbefaler, at du gennemfører denne del af din forberedelse, inden undervisningen i forløbet begynder. - Overfør en kode
Her skal eleverne installere programmet mLink på en computer. Programmet skal bruges til at overføre kode til robotterne. Denne video guider klassen igennem installationen af programmet. I denne video kan du se løsninger på de udfordringer, man oftest støder på ved brug af mLink og mBlock. Hvis I bruger skolens elevcomputere, bør du søge vejledning hos skolens IT-ansvarlige om installationen. Husk at reservere elevcomputere inden denne aktivitet. Læs mere om databeskyttelse og GDPR under "Sikkerhed og håndtering" nedenfor. - Undersøg input og output
Her skal du overføre nye koder til de 15 robotter. Du finder koden på forløbets introside. Følg instruktionen her. Du kan vælge at lade eleverne overføre koden selv. Det kræver i så fald, at du deler instruktionen med dem. Det er vigtigt, at koderne ikke overføres til robotterne, før klassen har gennemført kapitlet "Selvkørende Biler", da I kan komme til at overskrive de koder, I skal bruge i kapitlet.
I lærerhæftet finder du på forsiden af alle kapitler en materialeliste med de materialer, som skal bruges i kapitlets aktiviteter. Du finder også en materialeliste på hver aktivitetsside.
Du vil modtage et LIFE Kit, der indeholder de fleste materialer til forløbet. De materialer, der ikke er i LIFE Kittet, er følgende:
- 2 tuscher/farveblyanter i forskellige farver pr. par
- 1 mobiltelefon eller tablet pr. par
- 1 computer pr. par
- 1 saks
- tape
Her kan du se en oversigt over alle materialer i LIFE Kit:

Du kan se en detaljeret liste over alt indhold i LIFE Kit her: Autopilot Materialeliste. Hvis flergangsmateriale går i stykker eller mangler, vil vi gerne vide det, så LIFE Kittet også er komplet til den næste klasse, der skal modtage det. Du kan notere det i materialelisten.
Appen LIFE Autopilot er et centralt element i forløbet. Eleverne benytter appen til:
- at bevæge sig rundt i den virtuelle by Blokby ved hjælp af teknologien Augmented Reality (AR). Her interagerer eleverne med byens borgere og undersøger problemer i trafikken.
- at producere videoer og speaks til Blokbys borgmester. Produktionen er opdelt i fire videosekvenser, hvor eleverne anvender, perspektiverer og formidler deres nye viden.
- at undersøge reaktionstid, bremselængde og simulering af etiske dilemmaer ved kodning af selvkørende biler.
Herunder kan du finde guides, der hjælper dig med installering og brug af appen:
Når I er færdige med forløbet, skal du og din klasse udfylde et spørgeskema. Du finder links til spørgeskemaerne på sidste side i forløbet.
Hvis I ikke gennemfører hele forløbet, skal I stadig udfylde spørgeskemaerne. Jeres mening er vigtig for os, så vi kan forbedre vores naturfaglige undervisningsforløb.
Forløbets indhold
Forløbet varer 14 lektioner, som du frit kan fordele over de tre uger, du har Autopilot Kit. Du kan læse mere om den indledende forberedelse og ekstra forberedelse til enkelte aktiviteter i afsnittet ”Din forberedelse” ovenfor.
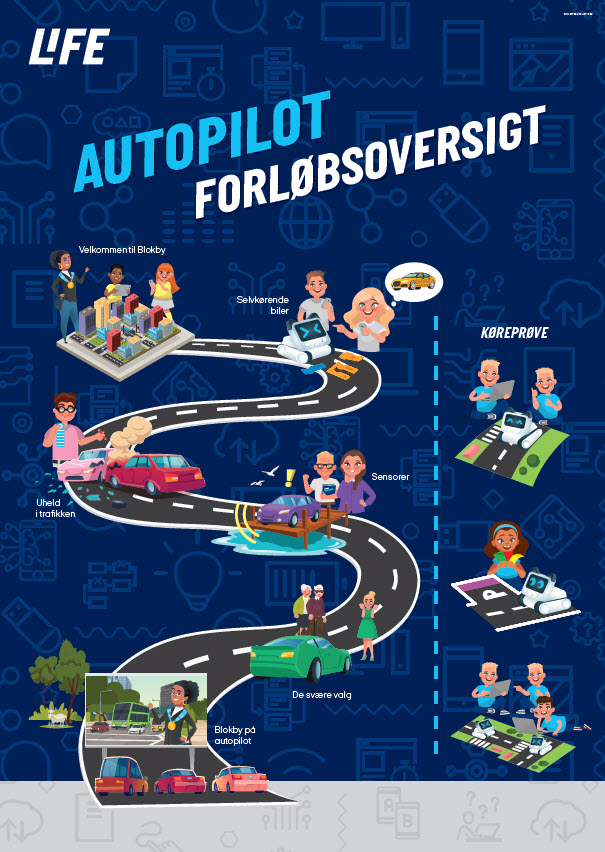
Herunder ser du en oversigt over forløbets ni kapitler. På første opslag i elevhæftet finder du forløbsoverblikket, som du kan vise og tale med eleverne om i første lektion. På første opslag i lærerhæftet finder du en udgave af forløbsoverblikket, hvor varigheden af hvert af de ni kapitler fremgår. Her kan du også se, hvilke kapitler du skal reservere computere til, hvis eleverne ikke bruger deres egen computer.
Elevhæfte
I LIFE Kit medfølger 15 elevhæfter, som eleverne arbejder sammen om parvis igennem hele forløbet. I elevhæftet introduceres eleverne for de ni kapitler og alle underliggende aktiviteter i Autopilot. Du finder en digital udgave af elevhæftet her. Den kan du vise på klassens digitale tavle, når du introducerer kapitler og gennemgår aktiviteter med eleverne.
Lærerhæfte
I LIFE Kit medfølger et lærerhæfte, som du bruger i din undervisning igennem hele forløbet. I lærerhæftet finder du lærerguides til de ni kapitler og alle underliggende aktiviteter i Autopilot. På hver kapitelside i lærerhæftet finder du lærerguides med en kort beskrivelse af kapitlet, kapitlets varighed, kapitlets læringsmål, didaktiske overvejelser, din forberedelse og en materialeliste.
På hver aktivitetsside i lærerhæftet finder du lærerguides med en kort beskrivelse af aktiviteten, didaktiske overvejelser, din forberedelse og en materialeliste. I aktiviteter, hvor eleverne svarer skriftligt i elevhæftet, finder du facit eller forslag til elevbesvarelser i lærerhæftet. Du finder en digital udgave af lærerhæftet her, som du med fordel kan anvende i din forberedelse, når du fx orienterer dig via links om programmering og installering.
MY:LIFE
En digital udgave af elevhæftet er placeret på forløbets introduktionsside på MY:LIFE. På denne introduktionsside kan eleverne få adgang til information, uden de behøver at logge ind. Adgang til lærervejledningen og den digitale udgave af lærerhæftet kræver log-in.
Sikkerhed og håndtering
Vær opmærksom på følgende:
- Augmented reality
Den virtuelle by Blokby er udviklet i teknologien Augmented Reality (AR). Det betyder, at byen er placeret som et ekstra virtuelt lag på den fysiske virkelighed. Eleverne skal derfor have god plads og være ekstra opmærksomme, når de bevæger sig rundt i Blokby, da det virtuelle lag kan skjule forhindringer i den fysiske verden. Du kan her se en aktivitet, hvor AR indgår. - LIFE Autopilot
Der indsamles ikke data ved brug af appen LIFE Autopilot. Al data, som eleverne producerer, gemmes lokalt på deres egne devices. Læs mere om LIFE's fortrolighedpolitik her. - mLink og mBlock
Eleverne skal downloade mLink til deres computer - på forløbets forside kan du se hvordan. Det er en driver, der gør det muligt at overføre koder fra onlineværktøjet mBlock. I mBlock koder eleverne de sekvenser, som skal overføres til robotten. Brug kun denne GDPR-sikre version af mBlock, der ikke indsamler data om brugerne. På forløbets forside på MY:LIFE kan eleverne tilgå den GDPR-sikre version.
OBS: Makeblock, som producerer Codey Rocky-robotten, har udviklet en app, hvor man kan bygge og overføre kode til robotten vha. bluetooth. På grund af GDPR-hensyn kan vi ikke anbefale brugen af denne app, da der er risiko for, at elevernes data ikke behandles forsvarligt.
Didaktiske overvejelser
Hvordan kan viden om kodning og selvkørende biler få elever til at reflektere over teknologiske løsninger af trafikale udfordringer? Hvilke didaktiske valg, metoder og faglige kompetencer understøtter elevernes undersøgelse af ovenstående problemstilling? Læs mere nedenfor.
Fortællingen i Autopilot tager udgangspunkt i FN´s Verdensmål 11 ”Bæredygtige byer og lokalsamfund”, der blandt andet handler om trafikale udfordringer forbundet med et stigende antal mennesker i byområder.
Den problemstilling møder eleverne igennem den fiktive by Blokby, der har store udfordringer med trængsel og sikkerhed i trafikken. Byens borgmester ønsker at løse de trafikale udfordringer ved at indføre selvkørende biler. Eleverne oplever og undersøger selv problemerne med trængsel og sikkerhed, når de bevæger sig rundt i Blokby i appen LIFE Autopilot.
Fortællingen er med til at udfolde centrale faglige pointer. Undervejs i forløbet møder eleverne tre bekymrede borgere fra Blokby. De bekymrede borgere repræsenterer hver især en central pointe om trafiksikkerhed, sensorteknologi og etiske overvejelser bag teknologien i selvkørende biler.
Fortællingen om de trafikale udfordringer i Blokby skal motivere eleverne til at samle op på deres egen viden. Eleverne optager fire videoer til borgmesterens kampagnefilm, der skal overbevise byens bekymrede borgere om, at selvkørende biler kan løse problemerne i trafikken. Videoerne ligger i slutningen af hvert kapitel og samler op på den nye viden, eleverne har lært i kapitlet.
I Autopilot møder eleverne flere didaktiske tilgange. I det følgende afsnit kan du læse om to metoder, som anvendes, når eleverne arbejder med kodning af robotter:
6F-modellen
6F-modellen indeholder faserne Forudsætning, Fang, Forsk, Forklar, Forlæng og Feedback. I det følgende beskrives, hvordan de seks faser afspejles i forløbet.
- Forudsætning: Fasen har til hensigt at aktivere og inddrage elevernes forforståelse og eksisterende viden om emnet. I dette forløb er det især i forløbets to første kapitler, du har mulighed for at få indblik i, hvad eleverne har af viden og forforståelse om trafikproblemer, robotter og selvkørende biler.
- Fang: Fang-fasen har til hensigt at fange elevernes interesse ved at koble robotter og selvkørende biler til elevernes egen hverdag og fremtid. Denne fase er især i spil i kapitlet "Selvkørende biler", hvor eleverne både arbejder med robotter og selvkørende biler og til sidst kobler disse sammen.
- Forsk: Eleverne udforsker og/eller indsamler data og begynder at lave beskrivelses- og forklaringsmodeller baseret på deres udforskning. Nedenfor er beskrevet, hvordan der arbejdes med både Forsk- og Forklar-fasen i en konkret aktivitet.
- Forklar: Eleverne deler deres observationer, hypoteser og konklusioner, men vigtigst er, at eleverne afprøver deres argumenter og ræsonnementer i dialog med læreren og de øvrige elever.
- Forlæng: Forlæng-fasen har til formål at give eleverne mulighed for at anvende og overføre deres viden, således at deres forståelse bliver dybere, og anvendeligheden af den bliver bredere. I afsnittet "Videre arbejde" nedenfor kan du læse mere om en oplagt Forlæng-aktivitet.
- Feedback: Der indgår muligheder for feedback undervejs i hele forløbet. Du kan også give eleverne feedback ved løbende at stille spørgsmål til deres arbejdsprocesser eller bede dem forklare deres koder og give dem nye udfordringer.
I aktiviteten Match robotter og koder er det primære fokus på Forsk- og Forklar-faserne. Her skal eleverne gennem observation af robotters bevægelsesmønstre finde den kode, der passer til hver enkelt robot. Din rolle som lærer er derfor at understøtte elevernes undersøgende tilgang. Du skal have fokus på deres metode og argumentation: hvordan systematiserer de deres undersøgelser, og hvordan argumenterer de? Denne aktivitet giver dig samtidig et indblik i elevernes forudsætninger for at arbejde med kodning. Desuden skabes der et fundament for, at alle elever selv kan sammensætte kodeblokke og få deres robotter til at bestå Køreprøve 1.
Use-modify-create
Aktiviteterne Kør med sensorer og Køreprøve 2 benytter en anden didaktisk tilgang, nemlig Use-modify-create. I aktiviteterne skal eleverne først kopiere og afprøve (use) en mere kompleks kode, hvor robotten bruger sensorer. Når eleverne har kopieret og afprøvet koden, kan du give dem små benspænd, så robotterne opfører sig en smule anderledes. Det kræver, at eleverne analyserer koden for at finde ud af, hvor i koden der skal laves rettelser (modify). I Køreprøve 2 bygger (create) eleverne selv koder, så deres robot kan bestå køreprøven kun ved hjælp af sensorer. Her anvender eleverne den viden, som de har tilegnet sig i de to foregående faser.
I Autopilot arbejder eleverne med kompetenceområder fra teknologiforståelse integreret i fagene natur/teknologi og matematik. Særligt har vi haft fokus på områderne teknologisk handleevne, computationel tankegang og digital myndiggørelse.
Kompetencerne teknologisk handleevne og computationel tankegang er særligt i fokus i de aktiviteter, hvor eleverne arbejder med kodning af robotten.
I kapitlerne Køreprøve 1, Køreprøve 2 og Køreprøve 3 skal eleverne selv konstruere koder til at løse konkrete problemer. Her arbejdes der i høj grad med teknologisk handleevne.
I aktiviteten Kør med Sensorer kommer computationel tankegang særligt i spil, når eleverne arbejder med Use-modify-create-metoden. Her lærer de at genkende og tilrette algoritmer i forskellige sammenhænge og redegøre for deres funktioner.
I aktiviteterne Træf svære valg og Tal om programmørens valg i kapitlet De svære valg er digital myndiggørelse i fokus. Her undersøger eleverne etiske problemstillinger i forbindelse med indførelse af selvkørende biler.
I dag accepterer vi, at mennesker handler instinktivt i ulykkessituationer. Selvkørende biler har med præcise sensorinput og lynhurtige processorer mulighed for at analysere ulykkessituationer og kan nå at reagere på et informeret grundlag. Eksemplet er et af de dilemmaer, som opstår, når vi skal programmere computere til at træffe valg i svære situationer. I aktiviteterne arbejder eleverne med konsekvensvurderinger og reflekterer over teknologiens betydning i hverdagen.
Autopilot er målrettet elever i 5. klasse. Forløbet tager udgangspunkt i, at det kan være første gang, de stifter bekendtskab med kodning og forløbets fokusord.
Differentiering
Da eleverne kan have forskellige forudsætninger med kodning, er der fokus på differentiering, når eleverne arbejder med robotten. Særligt i kapitlerne Køreprøve 1, Køreprøve 2 og Køreprøve 3 er der mulighed for, at eleverne kan arbejde i forskellige tempi og med forskellige sværhedsgrader. Mange elever vil være drevet af en naturlig nysgerrighed, hvor de i deres tomandsgrupper giver sig selv flere udfordringer. Som lærer kan du understøtte dette ved at opmuntre eleverne til at give hinanden små udfordringer.
I aktiviteten Kør med sensorer kan du ligeledes tilpasse de benspænd, du giver eleverne i forhold til deres niveau. I lærerhæftet får du bud på, hvordan du kan gribe det an.
Variation
Køreprøverne er placeret imellem de andre kapitler. På den måde varierer forløbet mellem borgernes bekymringer over selvkørende biler, elevernes produktion af video til borgmesterens kampagnevideo og de tre køreprøvekapitler med fokus på kodning.
Læs mere om forløbet
Vil I arbejde videre med en designudfordring, hvor eleverne undersøger muligheder for selvkørende teknologi i kollektiv trafik? Læs mere nedenfor, hvor du også finder information om blokkodning, selvkørende biler og vores samarbejdspartnere.
Forløbet tager afsæt i FN's verdensmål 11.2, som udover sikkerhed og tryghed i trafikken også fokuserer på adgangen til effektive kollektive transportsystemer med handicapvenlige forhold og overkommelige billetpriser.
Designudfordring
Hvis du ønsker at arbejde videre med verdensmålet, kan du give eleverne en designudfordring, hvor de skal undersøge, hvordan selvkørende teknologi kan bruges i en kollektiv kontekst. Her ligger fokus på den del af problemstillingen, der handler om trængsel og tilgængelighed.
En designudfordring tager udgangspunkt i en design thinking-proces fx FIRE-modellen. FIRE-modellen består af fire faser: Forstå, Ideudvikling, Realiser og Evaluer. Herunder følger en kort forklaring af de fire faser:
- Fase 1: Forstå
I fase 1 opnår eleverne forståelse for det problem, der skal løses. De skal stille krav til designet ud fra brugernes behov. Denne brugerforståelse indebærer en indsigt i, hvorfor udfordringen er et problem, hvem udfordringen er et problem for, og på hvilken måde udfordringen er et problem. - Fase 2: Ideudvikling
I fase 2 ideudvikler eleverne konkrete løsninger ud fra brugernes behov og designkrav. Eleverne udvikler ideer ud fra de designkrav, de opstillede i fase 1. Herefter deler de og inspireres af hinandens gode og mindre gode ideer. - Fase 3: Realiser
I fase 3 realiserer eleverne de bedste ideer ved at konkretisere dem. Indledningsvis designer eleverne prototyper, som de tester, afprøver, diskuterer og forbedrer. Ved at tegne, klippe og bygge med forskellige materialer nærmer eleverne sig deres konkrete forslag til en løsning på brugernes udfordring. - Fase 4: Evaluer
I fase 4 evaluerer eleverne prototypens opfyldelse af brugernes behov. Det endelige produkt præsenteres om muligt for brugerne, fx via en test af produktet. Eleverne reflekterer desuden over deres egen proces og udbytte af designudfordringen.
På emu.dk kan du finde mere information om designprocesser.
Blokkodning
Eleverne bruger det webbaserede program mBlock til at bygge og overføre kode til robotterne. Det kræver installation af driveren mLink. Du kan læse mere i afsnittet "Din forberedelse" ovenfor.
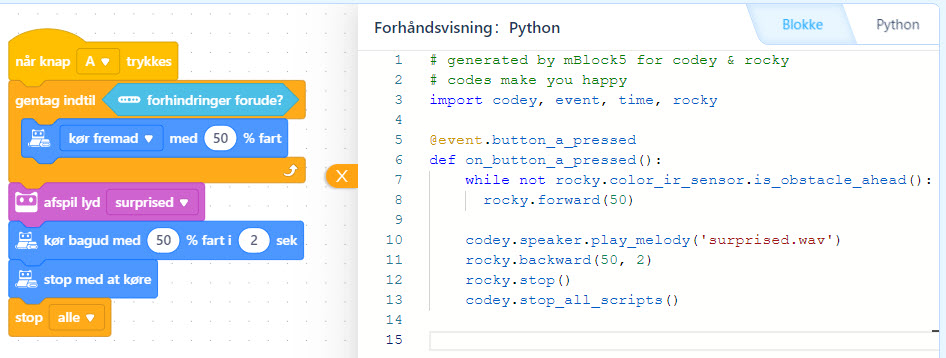
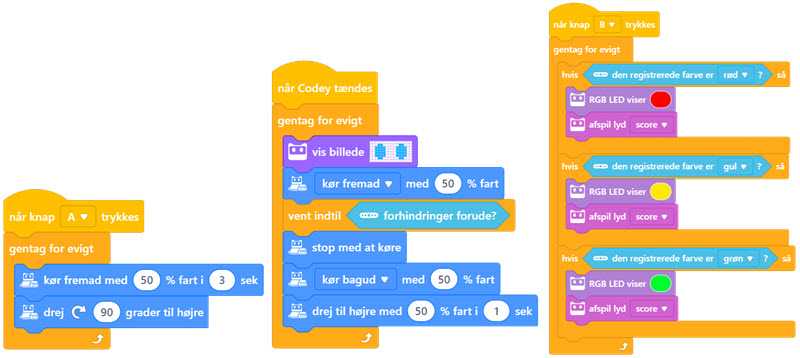
Blokkodning er en måde at bygge kode på, der benytter sig af grafiske byggeklodser i stedet for et rigtigt kodesprog, fx kodesproget Python (se illustrationen herunder). De enkelte kodeblokke har forskellige farver, der indikerer, hvilken kategori de tilhører. Kategorierne er fx sensorinput, løkker, lydoutput og styring af robottens motorer.
Blokkene har forskellige fysiske udformninger, der sikrer, at de nemt kan samles, så en computer kan aflæse dem. Når eleverne har bygget en kode, der kan eksekveres af en computer, kaldes det syntax. Hvis kodeblokkene ikke passer, betyder det, at koden er bygget på en måde, computeren ikke kan aflæse. Eleven har altså lavet en syntaxfejl.
Nedenfor kan du læse et par vigtige pointer om blokkodning.
- Hændelsesblokke er de gule blokke og kaldes også startblokke. Denne blok fortæller robotten, hvilket input der får robotten til at udføre en bestemt handling. Det kan fx være lyd, lys, bevægelse eller et tryk på én af robottens knapper. En kode kan som udgangspunkt kun eksekveres af robotten, hvis den er forbundet til en hændelsesblok. Ved at bruge forskellige hændelsesblokke kan eleverne overføre mange forskellige koder til robotterne på én gang. Dette kan fx bruges i aktiviteten Kør med sensorer, hvor eleverne kan bygge, overføre og eksekvere fem koder på én gang blot ved at vælge forskellige hændelsesblokke.
Løkker findes i den orange kontrol-kategori. En løkke bruges til at gentage et stykke kode flere gange. På den måde slipper eleverne for at kopiere koden. En løkke kan indstilles til at kopiere et stykke kode, lige så mange gange man ønsker. Der findes også mere komplicerede former for løkker som fx betingelser eller hvis-så-løkker. En betingelse kan bruges til at bestemme, om noget skal ske eller ikke ske.
Ønsker du mere viden om robotten Codey Rocky, kan du læse mere på firmaet Makeblocks hjemmeside her og her.
Selvkørende biler
En selvkørende bil er en bil, der er udstyret med teknologi, der gør det muligt at køre uden menneskelig indblanding. Denne teknologi inkluderer sensorer, kameraer og andre enheder, der hjælper bilen med at opfange omgivelserne og træffe beslutninger om, hvordan den skal navigere. Udviklingen af selvkørende biler er forbundet med et behov for at skabe et mere effektivt, sikkert og miljøvenligt transportsystem.
Selvkørende bilers autonominiveauer
The Society of Automotive Engineers (SAE) definerer seks niveauer af autonomi. De seks niveauer beskriver, i hvor høj grad styringen af en bil overtages af autonome systemer. Disse niveauer er blevet vedtaget af det amerikanske transportministerium og siden gjort til branchestandard.
- Niveau 0 - ingen automatisering
Bilen har ingen selvkørende funktioner. - Niveau 1 - assisteret kørsel
Bilen har enkelte selvkørende funktioner fx adaptiv fartpilot eller vejbane-assistance. - Niveau 2 - delvist automatiseret kørsel
Bilen kan køre selvstændigt, men bilisten skal stadig have fuld kontrol og være parat til at tage over, når det er nødvendigt. - Niveau 3 - betinget automatiseret kørsel
Bilen kan køre selvstændigt under visse omstændigheder, men bilisten skal stadig være parat til at tage over, hvis systemet beder om det. - Niveau 4 - høj grad af automatiseret kørsel
Bilen kan køre selvstændigt i et defineret geografisk område, men bilisten skal stadig være i stand til at tage over, hvis der opstår en nødsituation. - Niveau 5 - fuld automatiseret kørsel
Bilen kan køre selvstændigt under alle forhold, og bilisten behøver på intet tidspunkt at overtage kontrollen.
Udfordringer med selvkørende teknologier
Der følger flere udfordringer med brugen af selvkørende biler.
- Teknologisk udvikling
Selvkørende teknologi er stadig i sin vorden, og der er mange tekniske udfordringer, der skal løses, før selvkørende biler kan blive almindeligt accepterede og udbredt. - Juridiske og lovgivningsmæssige spørgsmål
Der er mange juridiske og lovgivningsmæssige spørgsmål, der skal løses i forbindelse med brugen af selvkørende biler. Det gælder særligt spørgsmålet om ansvar og erstatning i tilfælde af ulykker. - Accept fra offentligheden
Der er mange mennesker, der er skeptiske over for ideen om selvkørende biler, og det kan være svært at få bred accept af teknologien. - Infrastruktur
Selvkørende biler kræver en avanceret infrastruktur, da sensorer og andre teknologiske enheder skal installeres i offentlige veje og gader. Dette kan være dyrt og tidskrævende. - Cybersikkerhed
Selvkørende biler er udsatte for cyberangreb, og der er behov for at sikre, at de ikke kan hackes eller saboteres.
Autopilot er udviklet i samarbejde med forskere fra DTU management.
DTU Management forsker i samspillet mellem ledelse, teknologi og økonomi. De udvikler løsninger i tæt samarbejde med virksomheder og myndigheder.
Deres forskning har til formål at styrke velfærd, produktivitet og bæredygtighed i samfundet. Et nøgleelement er teknologiens rolle og dens interaktion med erhverv og mennesker.
Instituttets forskning er delt op i fire divisioner: Responsible Innovation and Design , Management Science, Bæredygtighed og Transport.